Где се користи роцкер механизам?
Ако говоримо о механизму роцкер, требало би да почне са чињеницом да "сцене" - француски речи које могу бити преведена на наш језик, као "део" или "линк".
Опште информације
Са техничке тачке гледишта, испод стијенамеханизам се схвата као уређај чији је задатак претварање ротационог или осцилаторног покрета у реципрочно покретање. Међутим, овај механизам такође може вршити инверзну функцију. Ако говоримо о општој класификацији овог уређаја, онда може бити од три врсте - ротирајућег типа, кретања или кретања праволинијски. Међутим, ако схватите природу роцкер механизма, постаје јасно да се свака од његових сорти може приписати пољу типа уређаја. Поред тога, важно је напоменути да је рад крила упарен са још једним детаљима, названим клизачем. Овај део такође представља ротирајућу улогу у целокупном дизајну механизма.
Предности и материјали
Главна предност овог механизма јеобезбеђујући прилично брзи клизач који се развија приликом извођења стражњег удара. Ова предност је довела до чињенице да је такав уређај постао врло широко примењен у опреми која има неуредни повратак. Поред тога, ако упоредимо механизам за затезање са шипком за повезивање, на пример, први може да пренесе много мање напора у односу на други.

Најчешће се користи везни уређајДа би се што ефикасније претворио је могуће јединствену обртно кретање ручице у ротационо кретање директно сцене. Треба напоменути да је овај покрет је неједнак. Међутим, постоје ситуације када ће покрет сцене и даље бити јединствена. Најчешће то се дешава када је растојање између лежајева и особењак страни сцене је једнака дужини ручице. У таквом систему линк механизам ће истовремено бити и педалу, који је приложен уз бочне сцену са јединственом покрету.
Дизајн и дистрибуција механизма
До данас је најчешћедизајн крила је четворо-веза. Осим тога, сви дизајни овог типа могу се сврстати у неколико група, зависно од тога који је тип треће везе у уређају. Постоје класе као што су: двослојни, криво-клизач, роцкер-роцкер, ролик-роцкер.

Најчешћа употреба ових механизама јеу различитим врстама алатних машина, као што су сечење зупчаника, унакрсна скела и друге машине, што се може приписати типовима резања метала. Суштина рочног механизма је да је ово једна од многих варијанти шипке. Коришћење механизма са везом користи се ако постоји потреба за опремом за претварање ротационог кретања у реципрочно. У типовима алатних машина за алатке користи се врста сонде везе, ау машинама за глодање уграђени је окретање ротирајућег типа.
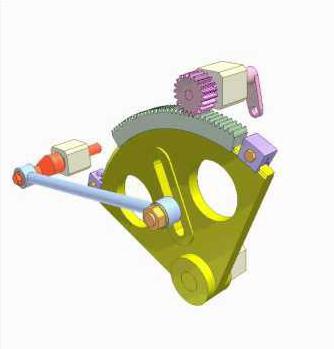
Структура механизма са четири везе
Четири-линк роцкер са роцкеромкамен је систем који се може узети у обзир на примјеру планера гдје се користи овај тип уређаја. Рад овог система може се описати на следећи начин. Рукавица кружно кретање око оси кроз камен за зицање, чиме се изазива осцилација ролера. Међутим, у исто време, ако погледате кретање камења за затезање у односу на крила, већ ће извршити повратно кретање. Овај тип уређаја се често користи иу хидрауличним пумпама, који имају механизам ротационог типа, са ротирајућим ножевима. Поред тога, механизам са четири везе пронашао је своју примјену међу различитим хидрауличним и пнеуматским погонима. У овом случају, дизајн претпоставља улазни клип на прикључном шипку, који клизи у цилиндру који се окреће или врти.

Клизни механизам
Овај модел механизма најчешће се користилабораторијске услове, а такође се користе и за обуку и упознавање са овим уређајем у условима образовних лабораторија у таквим примењеним дисциплинама и теоријској механици.

Вреди поменути да је распрострањенприлично распрострањен механизам лествичастих линија има прилично велике димензије. Ово је због чињенице да дизајн другог прикључног шипка са слајдером мањи је од праволинијског распореда шипке везе. Ова карактеристика дизајна указује на то да ће почетак прикључне шипке бити мањи од самог рока. Ово, заузврат, указује на то да такав механизам треба да има високу основу или оквир, а то значи да ће бити неопходно потрошити више новца на његово стварање, с обзиром да се вишак материјала троши на стварање таквог лежаја. Треба напоменути да се овај фактор сматра највећим проблемом и главним недостатком читавог система у цјелини.

Роцкер веза
Механизам везе и веза је проналазак,који је нашао своју примјену у области машинства. Главни циљ овог система је трансформација клипни кретање у ротационим погоном. Сврха за коју је измислио овај механизам, био је да се повећа век трајања система, као и да повећа своју ефикасност, односно ефикасност. Осим тога, чак прогоњене и циљеве попут оснаживање у области кинематике, због чињенице да је систем био испоручен са другом сценама, као елементи система су изведена на другачији начин.
Ручни механизам
Након проналаска овог система, његов челиккоји се приписују механизмима пивот-леверера који имају хидрауличне уређаје или пнеуматске уређаје, а сврха њихове употребе била је вентилација у складиштима. Дизајн овог механизма је прилично једноставан и садржи три основна елемента: сталак, ручицу и везу. Задатак који је постављен пред проналазача овог уређаја је побољшање поузданости уз истовремено поједностављење у смислу дизајна механизма. Прототип за проналазак овог модела био је хидраулични или пнеуматски механизам, који је такође користио везу са имплементацијом транслационог кретања. Осим тога, дизајн је био и рацк, клизач, ручица.
Поправке
Као и сваки други механизам, роцкер такође имањен животни век. На крају овог радног вијека, вријеме је да поправите механизам везе. Међутим, такође се дешава да уређај искључује сервис пре датума одређивања рока. Најчешће у овом механизму, његови делови као крила, камен за зглоб, зглоб, вијци и навртке покрета пузања, као и пуж с прстом, се истроше или бришу. Ако су површине жљебова на крилима истрошене више од 0,3 мм, а такође имају и дубоке бодове, а затим као поправку се користи млевење са накнадним радом. Ако хабање није превише јако, можете заобићи само стругање, без млевења.
Ако се крила исцуре, онда се, као поправак, зидови жљебова прво стављају у ред. При обављању посла најчешће су оријентисане на она подручја која су истрошена мање од других.